Auto Eye-in-Hand Calibration
-
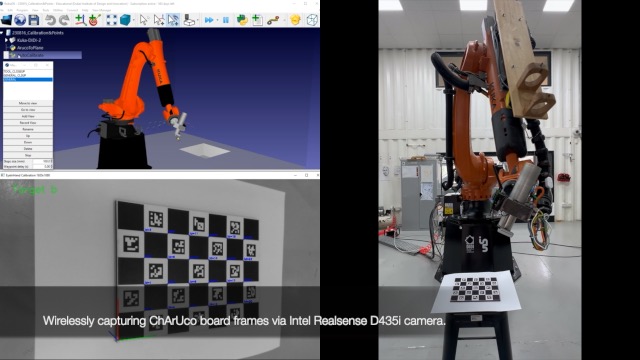
Description
Showcasing recent advancements in the realm of Eye-in-Hand calibration. By utilizing the capabilities of RoboDK and the Jetson Nano, wireless image transmission has been achieved using an Intel Realsense 435i – streamlining the calibration process. The next step? Incorporating real-time feedback loops during robotic operations, essential for precision tasks like additive manufacturing and much more.
-
Category
Ongoing research project
-
Status
Full solution for automated Eye-In-Hand calibration
-
Credits
Raffi Tchakerian
-
Tasks
Research leader
Ideator
Design Development
Technology research
Mechanics, sensors & electronics development
Programming -
Project Video
Watch the Video