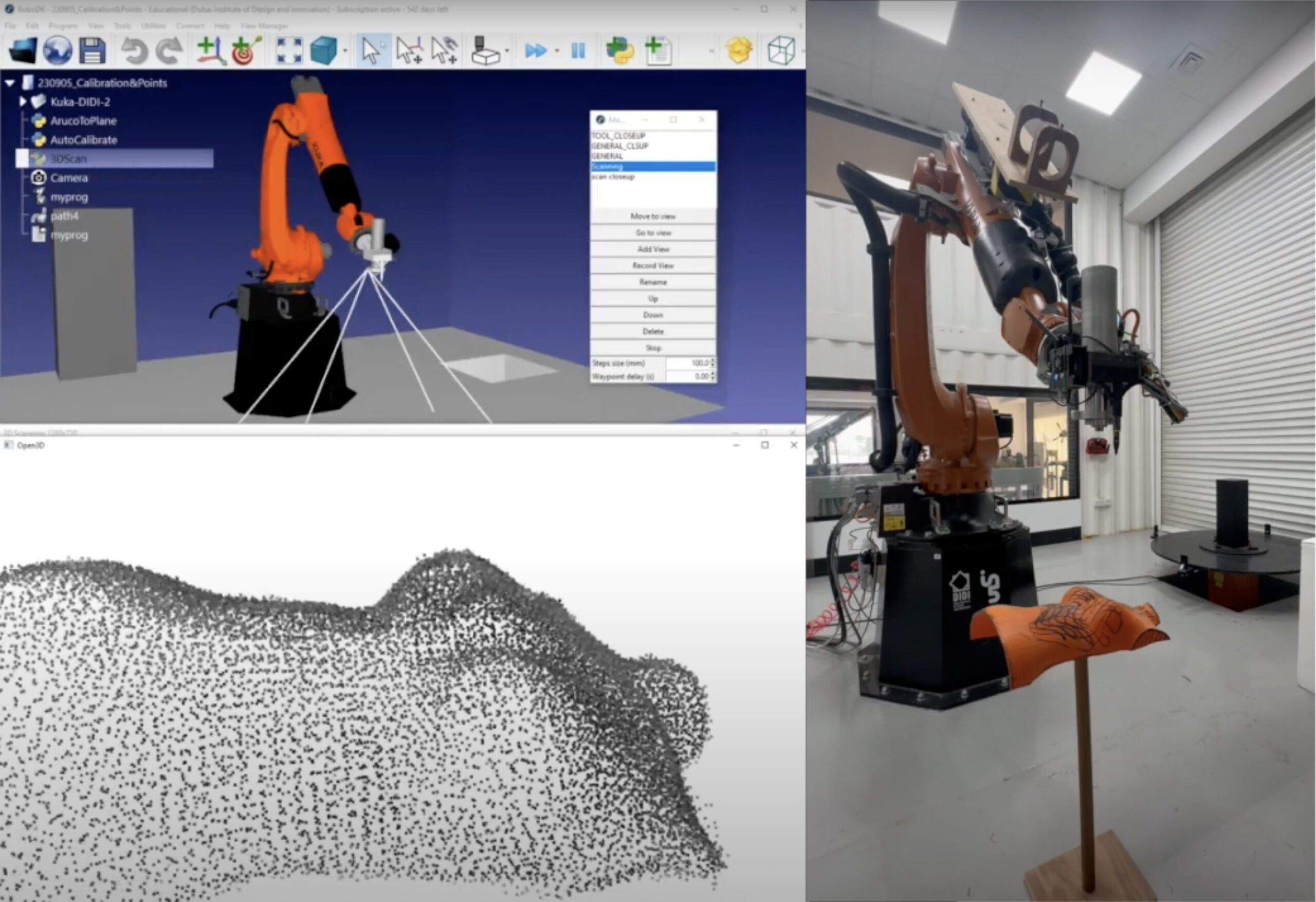
This study showcases Robotic 3D Scanning with KUKA KR 150 and NVIDIA’s NKSR. It introduces an innovative system combining a KUKA KR 150 robotic arm equipped with a calibrated Intel RealSense D435i camera, interfaced with a Jetson Nano. The Nano transmits in real-time color and depth frames to a RoboDK-equipped system. As the robotic arm navigates predefined targets, synchronized frames are captured and transformed into a refined point cloud using the Open3D library. An initial mesh, representative of the scanned object, is then generated and accurately positioned within the virtual RoboDK scene. Recognizing the need for high-fidelity mesh reconstructions in digital twins and robotic applications, this study further leverages NVIDIA’s Neural Kernel Surface Reconstruction (NKSR) to refine the mesh using the same point cloud. The culmination of this system is visually showcased, with the robotic arm expertly navigating a path on the high-quality, reconstructed surface. This research underscores the potential of melding state-of-the-art robotic systems with advanced neural reconstruction methods to achieve precision and efficiency in 3D modeling tasks.
-
Category
Full solution for automated 3D Scanning and account accurate model placement within the scene
-
Status
-
Credits
Raffi Tchakerian
-
Tasks
Research leader
Ideator
Design Development
Technology research
Mechanics, sensors & electronics development
Programming -
Project Video
Watch the Video